On this page, we will talk about the geometry of the bike.
The config file is found on NAMEOFTHEBIKE.geom
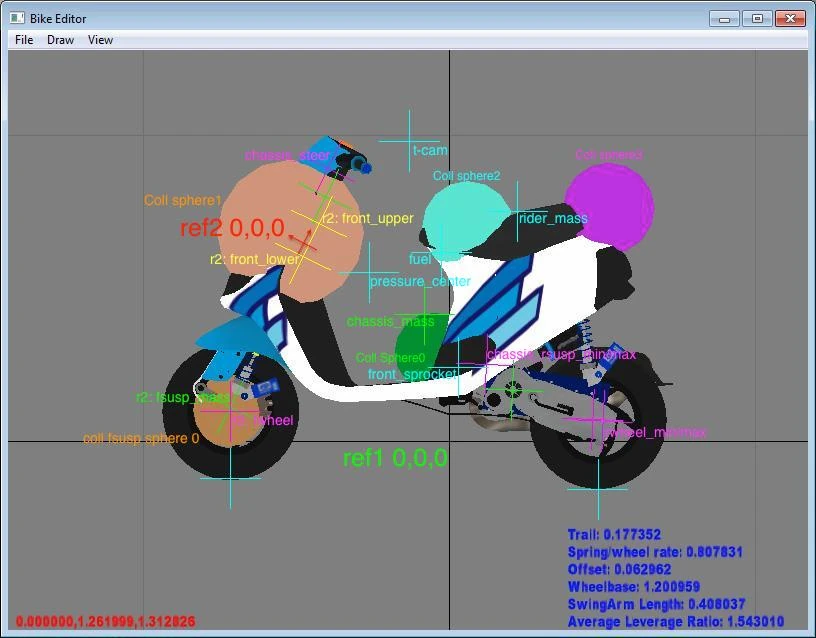
Unofficial Bike Tool[]
A first tool is available here. It displays the 990 model and its geometry points : https://mega.co.nz/#!4MQx2Dpb!WEskhgJgRAg5vbCNvLoeWR4E9FMYpynvXncC6PwTNxU
The same, but with the scooter : https://mega.co.nz/#!hEwyGYBZ!cS6x1xs1FsAghIzuyMfXvh3kSt0Ye7S0SXk9Wu1wH88
You will need geogebra to open it : http://geogebra.org
The chassis and swingarm are working (dynamicly set).
The front fork and lower fork are still not correctly linked to the chassis (relation is missing).
- Be careful ! The coordinates system used is (x,y) in geogebra = (z,y) in GPB !!!
- You only have to change the original parameter name (without '). All other points are processed dynamically !!
- The background image has to be scaled first to be used !!
- The collision box will be available in a future version, as well as the different measures
General info[]
- Units are in meters for the coordinate
- There is more than 1 reference (some parts have a reference to other part)
The reference system[]
- X> left (-) / right (+) of the bike
- Y> height of the rider
- Z> forward (+) / backward (-)
There is 5 groups (ie reference system) in the bike model :
- Front wheel
- Steering head
- Chassis
- Swingarm
- Rear wheel
The file itself[]
Bike info[]
type = bike
id = Varese_V594
Your id should match the id in config file
Reference : Chassis[]
chassis_mass = 0, 0.450389, 0.0104752
Position of the center of gravity of the chassis
chassis_steer = 0, 0.786057, 0.380405
Position of the center of gravity of the steering elements (triple clamp, ...)
The rider[]
rider_mass = 0, 0.856091, -0.3 rider = 0, 0.85, -0.42
Rider mass and center of gravity
Front sprocket[]
front_sprocket = 0, 0.373401, -0.135777
Footpegs[]
footpeg_left = -0.22, 0.4, -0.2 footpeg_right = 0.22, 0.4, -0.2
Position of the footpegs
Rear suspension pivot[]
chassis_rsusp_min = 0, 0.423847, -0.208398 chassis_rsusp_max = 0, 0.423847, -0.208398
Extreme Position of the swingarm pivot point.
swingarmpivot_steps = 2
Number of adjustment possible between these 2 points
Value "2" is for 3 adjustment points , count begins at "0".
0 = chassis_rsusp_min
1 = point between min and max
2 = chassis_rsusp_max
Misc[]
fuel = 0, 0.704142, -0.0947883
Center of gravity of the fuel mass
pressure_center = 0, 0.553665, 0.147739
??
t-cam = 0, 1, 0.02
Point of View (cockpit view)
Fork[]
Rake angle
rakeangle_min = 20 rakeangle_max = 24 rakeangle_steps = 4
These parameters defined the rake angle settings (min/max and how much settings available)
What is the point where it is attached???
Handlebars[]
grip_leftpos = -0.25, 0.00804171, 0.0415888 grip_leftdir = 1, 0, 0 grip_rightpos = 0.25, 0.00804171, 0.0415888 grip_rightdir = 1, 0, 0
Handlebars position and direction
Fork []
front_length = 0.12
Travel distance of the fork
Reference : upper fork[]
steer_mass = 0, -0.18679, 0.025183 steer_joint = -0, -0.104652, 0.0151901 front_upper = 0, -0.319211, 0.020801
??
Reference : lower fork[]
front_lower = -0, -0.392818, 0.0226877
??
fsusp_mass = 0, -0.529466, 0.0218526
??
fwheel = 0, -0.653701, 0.0251607
??
Reference : swingarm[]
rwheel_min = 0, -0.0739481, -0.535805 rwheel_max = 0, -0.0804631, -0.577924
Maximum and minimum position from the rear wheel in the swingarm referential
swingarm_steps = 2
Number of adjustment possible between these 2 points
Value "2" is for 3 adjustment points , count begins at "0".
0 = rwheel_min
1 = point between min and max
2 = rwheel_max
rsusp_mass = 0, 0.0314265, -0.278455
Position of the center of gravity of the swingarm
rsusp_joint = -0, 0.0739473, 0.025401
??
rear_upper = 2 rear_lower = -9
Upper and lower angle of the swingarm (when suspension is fully compressed/uncompressed
rear_length = 0.06
stroke of the rear shock/damper.
Collision objects[]
These elements defines what will be the contact points from the chassis, front suspension and rear suspension with the world.
The chassis, fsusp and rsusp elements have each their own referential.
coll
{
chassis
{
numspheres = 4
sphere0 = 0, 0.25, 0, 0.16
sphere1 = 0, 0.7, 0.45, 0.28
sphere2 = 0, 0.79, -0.15, 0.15
sphere3 = 0, 0.76, -0.66, 0.2
}
fsusp
{
numspheres = 1
sphere0 = 0, -0.65, 0.025, 0.14
}
rsusp
{
numboxes = 1
box0 = 0, 0, -0.35, 0.3, 0.15, 0.45, 0.14
}
}